







L'Université de Las Palmas est capable d'augmenter la vitesse des planeurs
L'Université de Las Palmas est capable d'augmenter la vitesse des planeurs

Une équipe internationale de chercheurs développe un nouveau modèle mathématique qui permet aux planeurs d'atteindre des vitesses sans précédent (Université de Las Palmas de Gran Canaria)
Une équipe de chercheurs de la Division de la robotique et de l'océanographie informatique de l'Institut universitaire des systèmes intelligents et des applications numériques en ingénierie (IUSIANI) de l'Université de Las Palmas de Gran Canaria (ULPGC), de l'Institut des sciences mathématiques (ICMAT) de la CSIC, de l'Université de Bristol (Royaume-Uni) et de l'Université de Rutgers (New Jersey, États-Unis) ont développé un système révolutionnaire de planification routière avec l'un des premiers drones subaquatiques de la transoéonique, de la non-tripulée ou de Silbo '.
L'équipe de chercheurs, dirigée par les scientifiques de l'ULPGC Antonio González Ramos et Josep Coca, rattachés au Service intégré des technologies marines avancées (SITMA-ULPGC), a appliqué un modèle mathématique utilisé en Astrodynamique pour la planification de routes plus efficaces et plus rapides pour les véhicules et les sondes spatiales. C'est la première fois que ces techniques sont mises en œuvre dans l'océan dans le même but, permettant au planeur d'atteindre des vitesses sans précédent dans l'histoire de la mission Challenger (2008-2018) avec une consommation minimale de batterie.
La technique mathématique est basée sur le fait que l'océan ouvert a un « squelette dynamique » qui régule les flux entre différentes masses d'eau en latitude, longueur et profondeur. Ce squelette "lagrangien" peut être identifié à partir de descripteurs mathématiques qui indiquent la direction et l'intensité des débits d'eau. Les débits semblent également regroupés autour d'un point hyperbolique central, un "point de rencontre" des débits d'eau. L'équipe a utilisé ces points comme points de repère pour diriger le drone sous-marin en se déplaçant vers l'est en utilisant les flux vers ces points hyperboliques les plus optimaux et rapides.
Silbo a traversé l'Atlantique Nord entre avril 2016 (Boston) et mars 2017 (Irlande). Dans ce deuxième voyage transocéanique, dont les résultats sont maintenant publiés, des mathématiciens, des océanographes et des ingénieurs ont participé au projet «Challenger Glider Mission», dirigé par l'Université américaine de Rutgers depuis 2008.
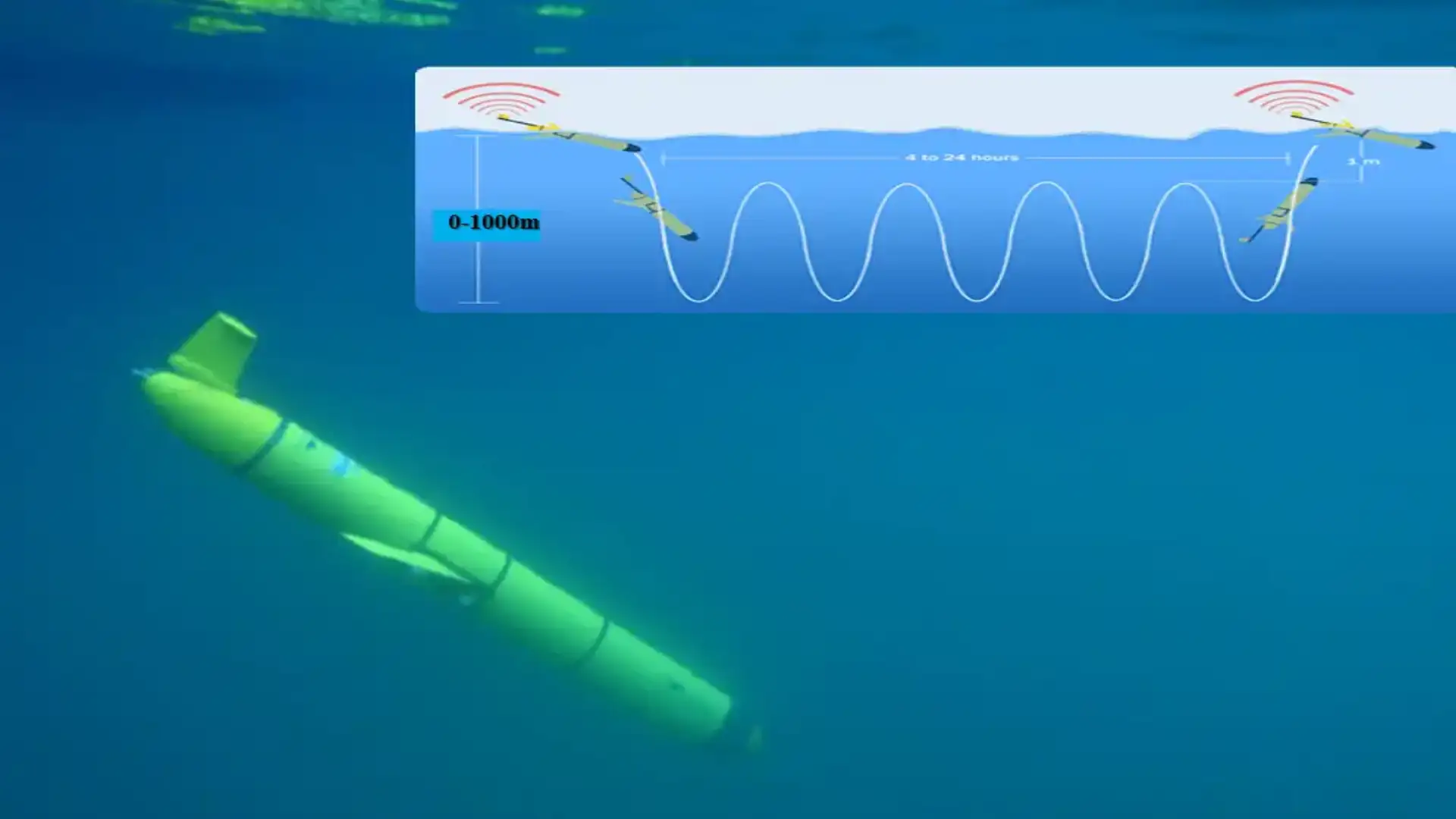
Les planeurs Slocum sont des véhicules sous-marins autonomes dont l'utilisation en océanographie, en tant que futur système de transport propre, se développe progressivement en raison de leur polyvalence pour explorer l'océan profond à très faible coût. Ils permettent également d'obtenir des données dans des zones de l'océan difficiles d'accès, comme les ouragans tropicaux, les zones polaires et/ou gravement contaminées, entre autres exemples. Ils consomment très peu d'énergie, donc ils sont idéaux pour parcourir de longues distances en utilisant les changements de flotteur. En fait, par une pompe / piston il introduit ou expulse de l'eau à l'intérieur du véhicule pour monter et / ou descendre la planification et avancer entre 0 et 1000 m de profondeur sans laisser aucune empreinte de CO2 comme les véhicules à moteur conventionnels.
© 2024 Nautica Digital Europe - www.nauticadigital.eu









